Contents
Overview
The srs_mixed_reality server is an component of the SRS Project for elderly care robot named Care-O-Bot. Using the information from the map server, Household database and SRS Knowledge Database it provides augmented reality stream for the UI_PRI user interface.
System architecture
The Mixed reality server consists of 5 nodes:
MRS
This node streams as a standard MJPEG/HTTP videostream the map information and augmented reality – household objects such a furniture and graspable objects. It also provides the functionality to stream selected ROS image topics.
The MRS node subscribes to /control_mrs topic which feeds object information for the augmented map drawing. The topic is published by the ControlMRS node.
ControlMRS
This node generates the combined information for the augmented reality using service calls to the SRS Household Database (info about the object size, grasping possibility and icon) and SRS Knowledge Database (info about name, class and pose).
The published topic (/control_mrs) structure is:
string command # Can be ADD or REMOVE (add or remove object from augmented map) uint32 virtual_obj_number # the unique number of the object on the virtual map uint32 virtual_obj_count # total number of the objects drawn on current frame of the virtual map string topic # name of the image topic which will be augmented int32 id # ID of the object in HH DB string label # Text to label the drawn object int32 type # Possible types: # 1 - CONTOUR_RECTANGLE; (only for augmentation level 2) # 2 - CONTOUR_ELIPSE; (only for </nowiki>augmentation level 2) # 3 - USE IMAGE (only for augmentation level 3) float32 x # Center of the drawn object on x axis float32 y # Center of the drawn object on y axis float32 width # Width of the object bounding box float32 height # Height of the object bounding box float32 angle # Rotation of the object in Degrees string clr # clr - Color of the object representation shape in HTML color – for exmple #FF0000 red # (valid only for augmentation level 2) sensor_msgs/Image image # topview image icon for the object (only for augmentation level 3)
RealityPublusher
This node provide information to the UI about the objects located on the augmented map.
The published topic - /map_active_areas consists of ros header and array of data which conatains all the objects presented on the virtual map.
Header header uint32[] object_id # IDs of the object in Household Database string[] object_name # Object names – eg. Table, Fridge and etc. string[] object_base_shape # Object base shapes (currently rectangle or ellipse) uint32[] object_type # Object types such as furniture, unknown. uint32[] x1 # Top left corners of object bounding box (x axis) in pixel coordinates uint32[] y1 # Top left corners of object bounding box (y axis) in pixel coordinates uint32[] x2 # Bottom right corners of object bounding box (x axis) in pixels uint32[] y2 # Bottom right corners of object bounding box (y axis) in pixels uint32[] angle # Bounding box rotation angles in degrees bool[] graspable # Grasping possibility
MapTF
This node converts the coordinates, and sizes from ROS metric to pixel coordinates on virtual map and vice versa. It is provided as a ROS service srs_mixed_reality_server/MapTransform:
uint32 transform_type # Transform type can be: # 1 - transform position from metric to map pixel coordinates # 2 - transform size from metric to map pixel size # 3 - transform position from pixel to metric coordinates # 4 - transform size from pixels on map to metric geometry_msgs/Point world_coordinates (input point in metric - types 1 and 2 or pixels - types 3 and 4) --- geometry_msgs/Point map_coordinates (output point in pixels - types 1 and 2 or metric - types 3 and 4)
It also publishes the position of the robot in pixel map coordinates on topic /maptf.
Assisted Detection Node
The Care-O-Bot assisted detection feature enables the user to initiate the detection process on selected region and choose the right object in the UI_PRI, when multiple detections are available. This is implemented via the assisted detector node in the Mixed reality server, BB Estimator and srs_assisted_detection stack. Assisted Detector node This node operates as an ROS service /srs_assisted_detector called from the UI_PRI via the ROSBridge. The service have the following input parameters:
uint32 operation # 1 UIDetection, 2 BBMove, 3 Test std_msgs/String name # Name of the detected object int16[2] p1 # x1,y1 coordinates of the selected region in the UI /operation mode 2/ int16[2] p2 # x2,y2 coordinates of the selected region in the UI /operation mode 2/
The service response is:
string[] object_name # Array of the object labels detected uint32[] x1 # Array of the object x1 coordinates detected uint32[] y1 # Array of the object y1 coordinates detected uint32[] x2 # Array of the object x2 coordinates detected uint32[] y2 # Array of the object y2 coordinates detected std_msgs/String message # response from the BBMove if any
Operation modes
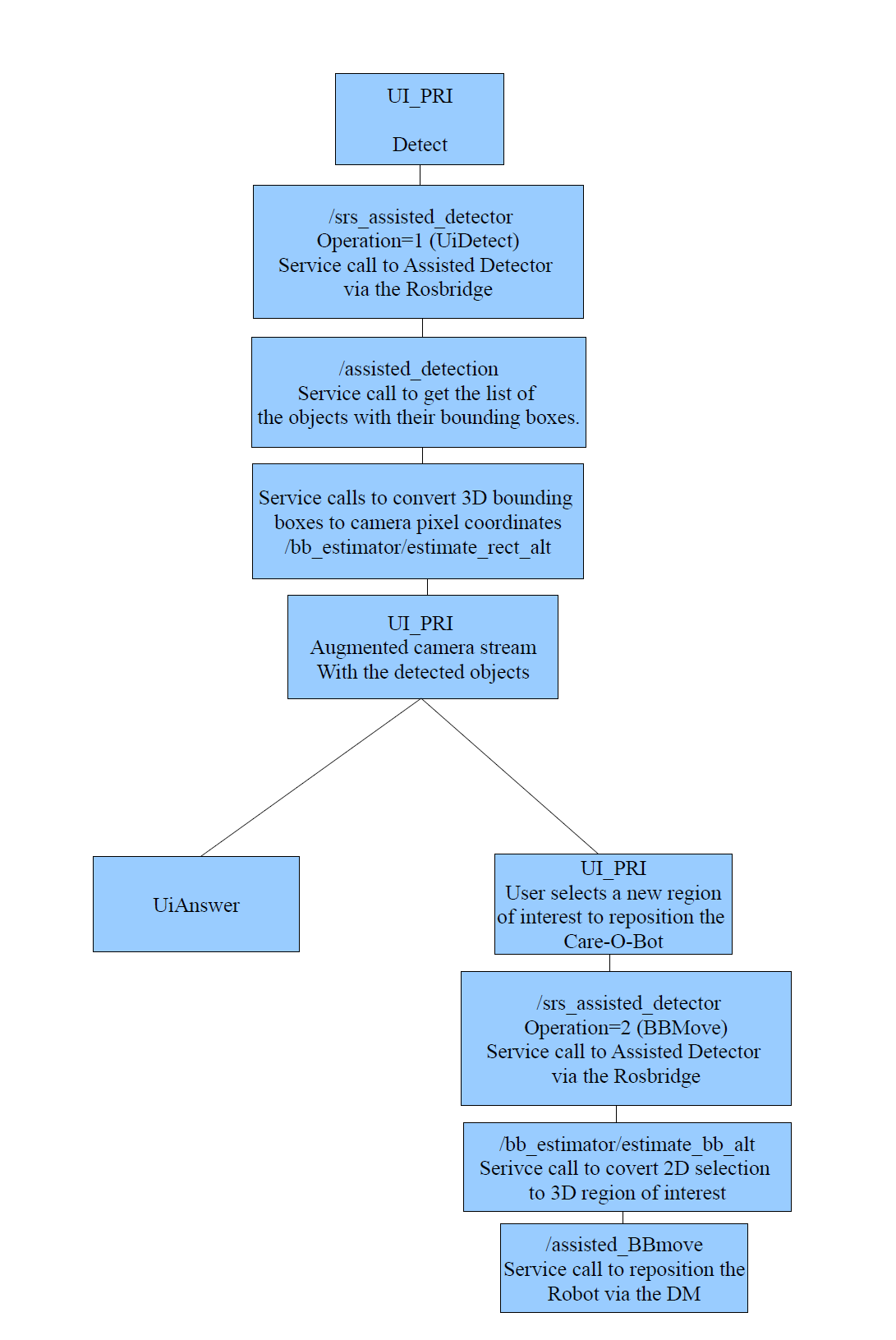
1. Operation mode 1 - UIDetect The user start the detection process in the UI_PRI via clicking on the Detect button. The service /srs_assisted_detector is called. It triggers the call to UIDetect service and converting the received array of detected objects from 3d bounding boxes to camera pixel coordinates via the BB Estimator Alt service. The output of the detected objects with the corresponding pixel coordinates is then passed back to the UI_PRI. After that an 2d rectangle around the object is displayed in the UI video. The user can select particular object and its id is passed via the UIAnswer service.
2. Operation mode 2 – if the detection is not successful the user can select an region of interest and the robot will be repositioned to allow better detection. The /srs_assisted_detector service is called with operation value 2 and p1,p2 coordinates of the selected points. The assisted detector calls BB Estimator to transform the coordinates from 2d to 3d bounding box and then calls the BBMove service. The response of the BBMove service is then passed to the UI. And if it possible the BBMove service repositions the robot to enable better detection.
3. Operation mode 3 – This mode is for test purpose only. It allows to test if the Assisted detector node is running, the communication path and the video overlay augmentation in the UI_PRI. In this mode the service /srs_assisted_detector returns coordinates and name of a test object - Milk box.
Assisted Detection Theory of operation
{kind=link}
Installation
These SRS package is not open to the public. If you want to run the packages, please write to goa@ipa.fhg.de, fmw@ipa.fhg.de. You can then fetch the source from the github.
rosmake srs_mixed_reality_server
Configuration
The node can be configured via its launch file – MRS.launch. You can customize the virtual map size and the augmentation level – 0 draw map only, 1 draw map and graphical representation of the objects (rectangles and ellipses) and 2 draw map with image icons.
<param name="mapWidth" value="1024" type="int"/> <param name="mapHeight" value="1024" type="int"/> <param name="augmentationLevel" value="2" type="int"/>
To start Mixed Reality Server
roslaunch srs_mixed_reality_server MRS.launch
Dependencies
In order to generate augmented map you need following components compiled and running:
roscore Care-O-bot simulation in gazebo or the real robot cob_2dnav (Care-O-Bot navigation stack) srs_knowledge (SRS Knowledge Database) srs_object_database (The Household Objects Database) rosbridge (to communicate to the UI_PRI)
Testing
You can test the output result using the UI_PRI on iPad or using a standard websockets compliant browser – as Google Chrome.
To view a snapshot - please open: http://127.0.0.1:8080/snapshot?topic=/map To view the live stream - please open: http://127.0.0.1:8080/stream?topic=/map You can monitor any ROS image topic for example: http://127.0.0.1:8080/stream?topic=/stereo/right/image_raw Note: replace 127.0.0.1 with the IP of your ROS server where you run the MRS.